Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
- БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
- БИБЛИОТЕКА GYVERSTEPPER
- ДОКУМЕНТАЦИЯ
- Документация
- Инициализация
- Время шага [NEW!]
- Медленные скорости (new!)
- Тик и тайминги
- Смена направления
- Режимы работы
- Режим FOLLOW_POS
- Режим KEEP_SPEED
- Алгоритм планировщика скорости
- Остановка и сброс
- Управление питанием
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Шаговый двигатель – принцип работы
- Где купить шаговый двигатель
- Драйвер для управления шаговым двигателем
- Драйвер шагового двигателя на базе L298N
- Драйвер шагового двигателя ULN2003
- Другие драйвера
- Подключение шагового двигателя к Ардуино
- Обзор основных моделей шаговых двигателей для ардуино
- Описание библиотеки для работы с шаговым двигателем
- Пример скетча для управления
- Заключение
- Arduino.ru
- Управление шаговым двигателем CD-привода
- 🎥 Видео
Видео:Шаговый двигатель от CD-ROM подключаем к Arduino.Motor Shield l293d.Скачать

 Принцип работы шагового двигателя
Принцип работы шагового двигателя
 Принцип работы шагового двигателя
Принцип работы шагового двигателяВ зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Видео:Как подключить шаговый двигатель от CD ROM к Arduino драйвер ШД A4988Скачать

Драйвер шагового двигателя Ардуино
 Драйвер шагового двигателя Ардуино
Драйвер шагового двигателя АрдуиноШаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
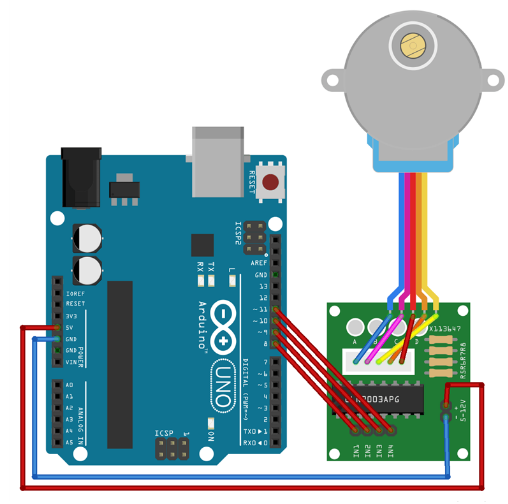
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Видео:Как подключить шаговый двигатель к ArduinoСкачать

Как подключить шаговый двигатель к Ардуино
 Как подключить шаговый двигатель к Ардуино
Как подключить шаговый двигатель к АрдуиноДля этого занятия нам потребуется:
Видео:Шаговый двигатель, как подключить без сложностей!!!!Скачать

БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
 БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
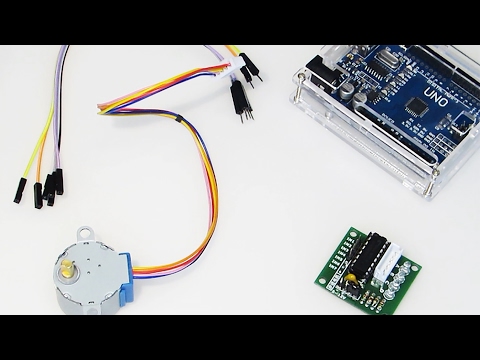
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINOДля подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
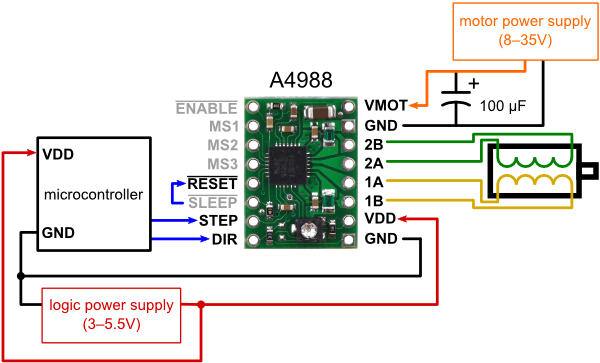
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.





Видео:Управление шаговым двигателем. Драйвер A4988, подключение и настройкаСкачать

БИБЛИОТЕКА GYVERSTEPPER
GyverStepper v1.8
GyverStepper – производительная библиотека для управления шаговыми моторами
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
Версия 1.1: добавлена возможность плавно менять скорость в режиме KEEP_SPEED. Добавлены примеры multiStepper и accelDeccelButton
v1.2 – добавлена поддержка ESP8266
v1.3 – изменена логика работы setTarget(, RELATIVE)
v1.4 – добавлена задержка для STEP, настроить можно дефайном DRIVER_STEP_TIME
v1.5 – пофикшен баг для плат есп
v1.6 – Исправлена остановка для STEPPER4WIRE_HALF, скорость можно задавать во float (для медленных скоростей)
Видео:ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Библиотека поддерживает два типа драйверов:
При инициализации указывается тип драйвера, количество шагов на оборот и пины:
Количество шагов на оборот нужно для работы функций, которые устанавливают или читают параметр в градусах. Если они не нужны – количество шагов можно поставить любое (единичку). Если нужно – количество шагов нужно указывать с учётом редукторов и микрошагов:
Время шага [NEW!]
Для драйверов STEP-DIR сделана задержка между переключением состояния пина STEP, эта задержка является минимальной, т.е. она может быть больше, чем нужно, но если будет меньше – возможна нестабильная работа драйвера. По умолчанию она составляет 4 микросекунды, но разным драйверам она нужна разная (для других драйверов см. даташит):
Также увеличение задержки может повысить стабильность работы при использовании длинных неэкранированных проводов от микроконтроллера к драйверу (к пину STEP).
Для изменения величины задержки сделай дефайн DRIVER_STEP_TIME перед подключением библиотеки:
Медленные скорости (new!)
Тик и тайминги
Смена направления
Режимы работы
Режим FOLLOW_POS
В этом режиме мотор следует на указанную позицию в шагах или градусах. Для её установки есть следующие методы:
Примечание: абсолютная позиция – говоришь мотору повернуться на 300 шагов, он повернётся на позицию 300. При повторном вызове ничего не произойдёт. Относительная – говоришь повернуться на 300 – он повернётся на 300 относительно текущей позиции. Если вызвать ещё раз через некоторое время – цель сместится относительно текущей позиции вала.
Установленную целевую позицию можно прочитать:
Дополнительно можно настроить максимальную скорость и ускорение при движении к целевой позиции:
Также можно вручную установить текущую позицию мотора в шагах и градусах при помощи:
Режим KEEP_SPEED
В этом режиме мотор просто крутится с заданной скоростью. Скорость задаётся при помощи
(New!) Вторым аргументом можно передать включение плавного изменения скорости, по умолчанию стоит false ( NO_SMOOTH ). Смотри пример accelDeccelButton
Установленную скорость можно прочитать:
Алгоритм планировщика скорости
В библиотеке реализовано два алгоритма планирования скорости для режима плавного движения к позиции с ненулевым ускорением:
Остановка и сброс
Управление питанием
Видео:Проект на Arduino: шаговый двигатель CD ROMСкачать

Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Видео:Вечный энкодер из BLDC двигателя CD-ROM-аСкачать

Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
Видео:Управление шаговым двигателем через Arduino (Arduino+TB6560+Nema 23)Скачать
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Видео:Шаговый двигатель 28BYJ-48 с драйвером ULN2003 - Подключение к ArduinoСкачать
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
В STEP/DIR драйверах используется 3 сигнала:
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Видео:Шаговый двигатель от дисковода / Stepper motor from CDСкачать

Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Видео:Моторчики из DVD-привода #2Скачать

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

Видео:Как настроить ШАГОВЫЙ ДВИГАТЕЛЬ 28BYJ-48 Arduino?! ОбзорСкачать

Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
Видео:NEMA17 Управление шаговым двигателем - Stepper motor with ArduinoСкачать

Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Видео:Управление моторами с ArduinoСкачать

Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Видео:Драйвер шагового двигателя A4988. Обзор и подключение к ArduinoСкачать

Arduino.ru
Видео:Подключение двигателя без электроники и Ардуино!Скачать

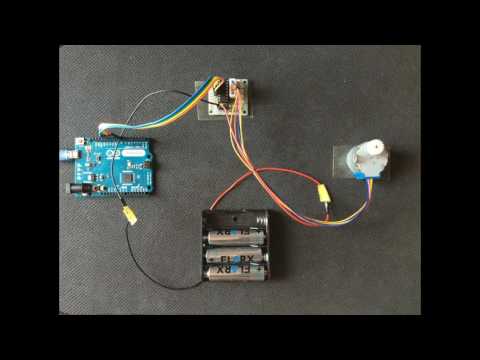
Управление шаговым двигателем CD-привода
Здравствуйте, есть вопрос к опытным ардуинщикам.
Когда я начал осваивать ардуино, то сразу же приобрел для знакомства шаговый мотор с «драйвером» на ULN2003. Вопрос в том, можно ли подключить к биполярному шаговому двигателю из CD-привода ардуино через этот «драйвер»? Если да, то подскажите, пожалуйста, как.


Не выйдет на ULN2003, она умеет только ключами землю подавать униполярному (с общим соединением обмоток)
а у вас биполярник- две раздельные обмотки, нужен мост и защита от сквозных токов.
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Вы сравниваете биполярник и униполярный двигатель. На Вашем вращение осуществляется поочередной подачей +5 на каждую ногу, а в CD/DVD поочередно меняются +5 и GND
У меня биполярный. Supereplosive пишет, что у него тоже биполярный. Раскажите, пожалуйста, чем отличается «подача поочередно +5 на каждую ногу» и «поочередно менять +5 и GND»? Я так понимаю у меня тоже меняется +5 и GND?
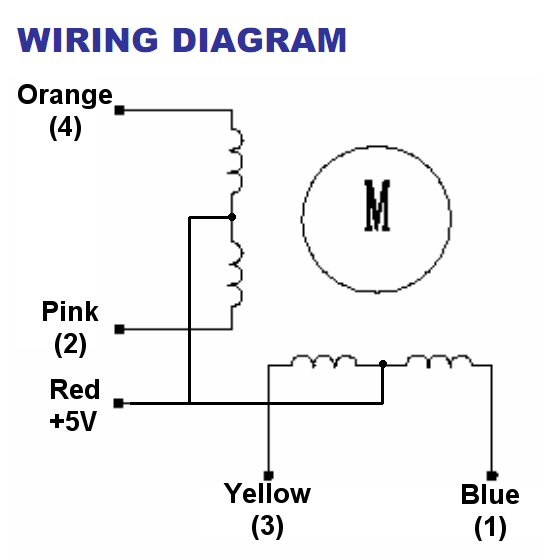
А Вас не смутило, что в приведенном PDF схема имеет 4 контакта (как на биполярном движке), а рисунок моторчика 5 (как на 28byj-48)?
Разница в том, что по 4 проводам, в вашем случае, поступает +5 вольт, по очереди, а 5-й идет на землю. UNL2003 служит для того, чтобы превратить миллиамперы с вашей ардуины в амперы для вращения двигателя.
А вот для биполярного двигателя от CD/DVD нужен драйвер, который умеет как включать +5, так и землю.
Разница конкретно в следующем:
на 28byj-48 подаем на первый провод+5. потом на 2 и так по кругу.
на CD/DVD мы должны подать +5 на первый прово и GND на 2й. потом +5 на 3-й и GND на 4-й. Затем мы подаем GND на первый и +5 на второй. UNL2003 не может соединить с землей. Либо +5, либо ничего. Но не земля.
Прошу простить мою тупость, но прошу потратить пару минут и разъяснить.
В приведенном мной примере к БИПОЛЯРНОМУ двигателю 28byj-48 (я сделал вывод, что биполярный, так как на схеме приведенной в PDF нет связи между парами обмоток) подходит 5ть проводов. 5й провод передает на моторчик GND(имхо). Какая разница с БИПОЛЯРНЫМ двигателем из CD-DVD?
Схема неверна! На схеме биполярный двигатель (4 провода). На рисунке униполярный двигатель (5 проводов). Вот правильная, для 28byj-48 схема.
Чувствую, что вы правы, но не верить PDF’ке как-то сразу не получается. Т.е. получается, что ULN2003 подключает моторчик к +5? Т.е. у меня униполярный двигатель? Меня надули?
а может товарищу попробовать библиотеку Stepper.h, она прямо так работает:
Драйверы для биполярника, насколько я знаю, стоят дороже.
0 это 0. GND это GND

Для шаговика из DVD есть A4988 и аналоги
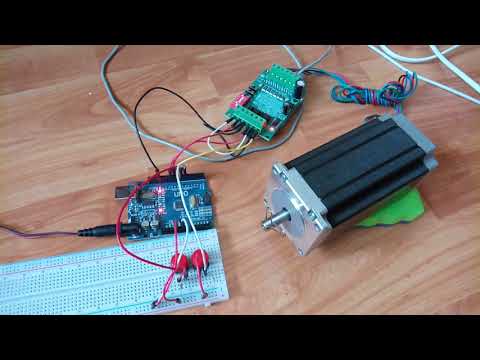
Вот тут работает на меге 2560 и l298.
Двигатель подключен к пинам 1В, 1А, 2А, 2В как на схеме у 4ishops

если фото вашей схемы, думаю что минимум это ваша проблема: 8.2-V to 45-V Operating Supply Voltage Range
Мой макет с двух ракурсов вот:


Здравствуйте, есть вопрос к опытным ардуинщикам.
Когда я начал осваивать ардуино, то сразу же приобрел для знакомства шаговый мотор с «драйвером» на ULN2003. Вопрос в том, можно ли подключить к биполярному шаговому двигателю из CD-привода ардуино через этот «драйвер»? Если да, то подскажите, пожалуйста, как.
Можно мои пять копеек.
Да все вы можете подсоединить как угодно. И дрыгаться будет мотор как угодно. Только воть чтоб дрыгался как хочется вам люди советуют для этой хрени скажем «биполярник» вам лучше всего прменить вот такую хрень «водитель мотора с выходом по принципу H-моста«. Смотрим на мио фото здесь на форуме. Вникаем изучаем. Чем я там развлекался СД-ромным.
Ищем тут по форуму мои исходники, что тут накидал. По словам водителей моторных 😉
На фото внизу пара ДВД-механик Пара ЛегкихДрайверов(A3957) Одна ведруинка Один светик. Там пара биполярных моторчиков уверенно шагающих начиная с 6.5 вольта.

ULN2003 это просто 6 ключиков тоже моторы дрыгаться будут. Но неудачно дрыгаются. На вкус и цвет товарища нет.
Мой макет с двух ракурсов вот:
а уже потом с кодом можно шаманить.

Добавлю: добрался до работы, вот ссылка, там все есть и схема для проверки работоспособности и скетч. Я правда все лишнее выбрасывал, делал просто чередующееся в одну и потом в другую сторону вращение для поиграться.
Мой макет с двух ракурсов вот:
а уже потом с кодом можно шаманить.
В правом нижнем углу питатель. На нем щупы от вольтметра красный черный. На питателе выход мимнимальный 6.5 вольта чтобы:
Моторам 5 вольт хватает. Драйверочкам моторов нет. Только с минимальных 6.5 вольта начинают ардуинку слушаться и управлять моторами. Так что деалайте что хотите но будьте готовы драйверочкам моторв дать побольше.
Двигатель подключен к пинам 1В, 1А, 2А, 2В как на схеме у 4ishops
Батенька вижу ваш драйверочек и не вижу
1 где питание минимум 8.5 вольт а проще 12 вольт?
2 где разрешение на подачу высокого напряжения (допустим 12 вольт) на катушки мотора. 1-ая нога ENABLE на землю по умолчанию?
Щас дальше посмотрю. Драйверок новомодный но подключение смотрю колассическое как у проверенного старичка А4988. Значит кроме отличия в максимальной микрошаганутости 1:16 1:32 различий нет.
3. SLEEP тоже к земле притянуть закоротить.
4. вообще принцип какой Все зделано так чтобы работать сутками без остановок поэтому спячкой и снятием высокого напряжения если не вы то микроконтроллер должен беречь в секунды простоя. По умолчанию земля кругом и все в землю затягивается. Кроме резета который уже затянуть в плюс слаботочного 5в питания. Радиаторчки не забудьте приклеить из комплекта. Потому как в таком режиме все Енабле и Спать в земплю мотор будет удерживатся током то есть греться. Отладить хватает. Пальцем щупайте контроллируйте нагрев.
Ваш леонардо должен иметь стабилизатор и прекрасно от 9 вольт работать. Ваш драйверочек 8855 тоже 9 вольт любить должен не перегреваясь. Вашему моторчику многовато 9 вольт но не сгорит. Поищите 9 вольт питание 500мА. Немного. Тютелька в тютельку. И не перегреется драаверок. Опасайте перепутки высокого напрячжения и низкого напряджения сгорит сразу без дыма и предупреждений. Этот тип драйверов никто не ремонтирует.Он так зделан чтобы просто заменять. Обычно я их не менее 5 штук за раз покупаю. Дешевые ведь.
Короче выкинте ту схему по которой собираете. Берите правильную. Для теста годится. В промышленном станке добавить только охлаждающие режимы.. Все свободные важные ногои в воздухе не болтаются. А вы смотрю желтым проводом типа охлаждение и резет накосячили и енабле высокого не разрешили. Тут автор может в земплю а может рулить нагревом в режиме простоя удержания сиреневым. А оранжевым из спячки слаботочку по любому вытянет потому как резет внутри уже в +5в подтянуты. И очень важный кандер от пробоя. Хотя народ думает это для сглаживания. Сглаживание да не то. Когда на мотором механика крутит. Мотор генерирует не балуй. А тут рядышком кандер сжирает импульсы иначе Н-мост сгорает только в путь. Защитных 8 штук мощных на 2 амера диодов нет. Внутренние конструктивные жидкие только на слабых моторах спасают или если механика не крутит моторм. Ваш случай. Мотор вообще некакой там и 1 ампера по 12 вольтам не будет.

Я эти «дрова еще не жог». Если получится отпишитесь.
🎥 Видео
Подключение шагового двигателяСкачать

Урок 16 Блоки Моторов ServoMotor (Сервомотор) и StepMotor (Шаговый двигатель) в программе FlprogСкачать

Подключение шагового двигателя к ArduinoСкачать